

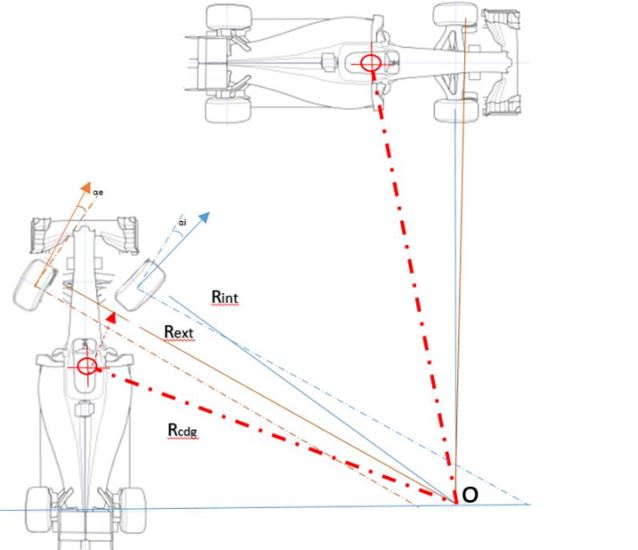
La geometría de dirección de Ackermann es una configuración de la geométrica de los sistemas mecánicos de dirección de los coches cuyo fin es compensar el hecho de que las ruedas exteriores e interiores recorren circunferencias de diferentes radios cuando se traza una curva. El problema fue descubierto ya con los coches de caballos en el siglo XIX.
Este sistema fue descrito en el artículo Técnica de Fórmula 1: El DAS o Dual Axis System de Mercedes. ¿Qué ventajas da y por qué?
En este artículo me gustaría añadir unas notas para complementar la información del precedente y así aclarar un concepto, el de la geometría variable de Ackermann, como innovación introducida en la F1 este año. En efecto, la geometría de Ackermann existe desde hace siglos y es aplicado a los vehículos desde sus principios con los coches de caballos.
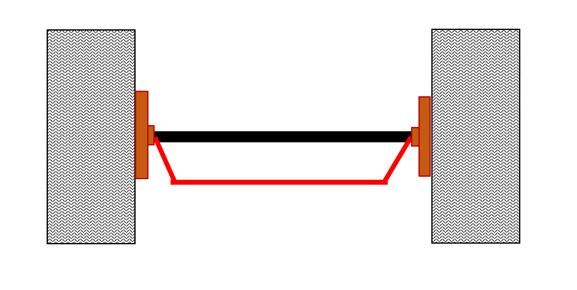
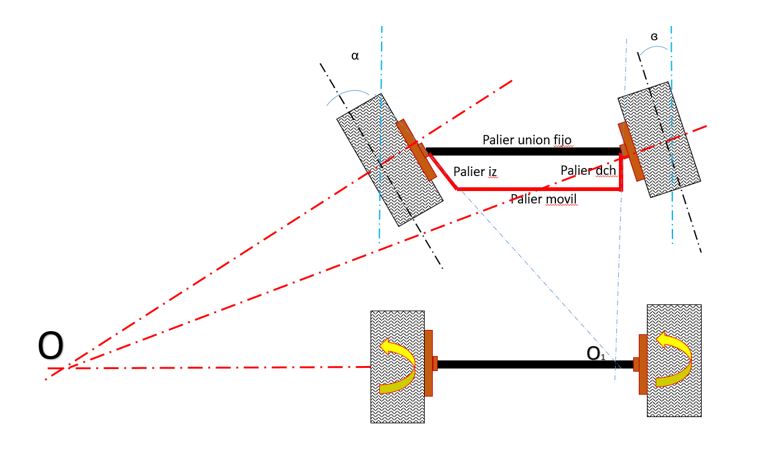
Para lograr esto se usa (en general y por simplificar) un sistema de trapecios.
Que cuando se modifica la dirección con el volante, cambia de forma proporcional la posición de las ruedas exteriores e interiores adaptándose así a las exigencias de la curva y cumpliendo los requisitos de ángulos distintos para distintas circunferencias a recorrer. Esto es el sistema geométrico de Ackerman.
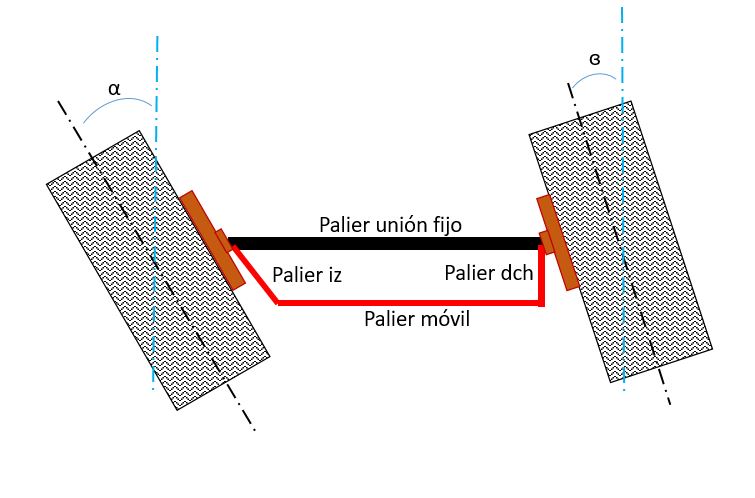
El problema es que, una vez que se diseña y monta el sistema físico, este es fijo para cada ángulo de giro. Es decir, siempre que entre en una curva de 30° los ángulos de rueda son siempre los mismos. Modificando el ángulo del “Toe” se modifican los ángulos de las ruedas con lo que, a un mismo ángulo de giro del volante, si la posición de la rueda ha sido modificada, el ángulo de la geometría de Ackerman también. Esto es una doble ventaja, por un lado, hacen las rectas con ángulo de “Toe” 0 que proporciona menor rozamiento, y por otro pueden tener distintas posiciones para distintas curvas (o la misma en distintos momentos de la carrera) según se vuelva el coche más o menos sobrevirador, tal y como se explica en el artículo precedente.
Por lo tanto, la magia del DAS es doble, por un lado, hace un “Toe neutro” en rectas, y por otro puede crear con distintos ángulos de convergencia de las ruedas, diferentes geometrías de Ackerman. Para esto habría que tener más de una posición del volante. Es posible en mi opinión que haya más de una posición.
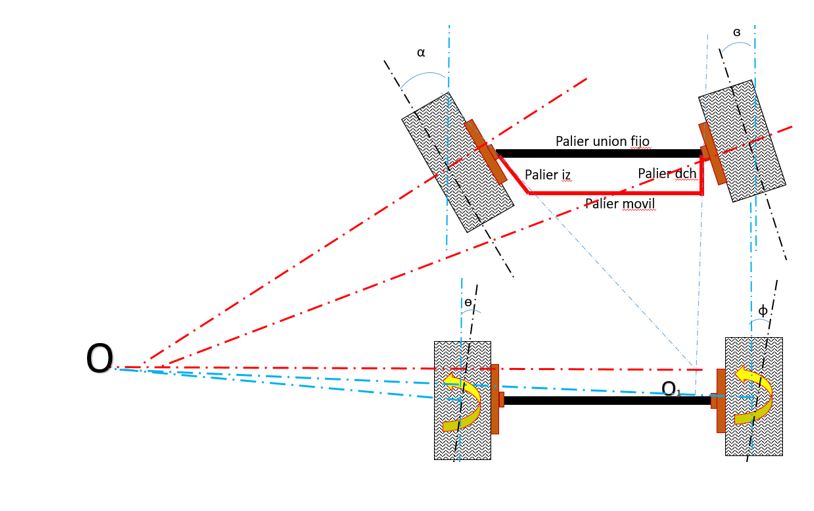
Para avanzar un poco más, diremos que a situación más favorable es la que los ejes de los palieres Iz e Dch se cruzan en el centro del palier trasero. De esa forma el rozamiento sobre el eje vertical de dicha rueda es menor.
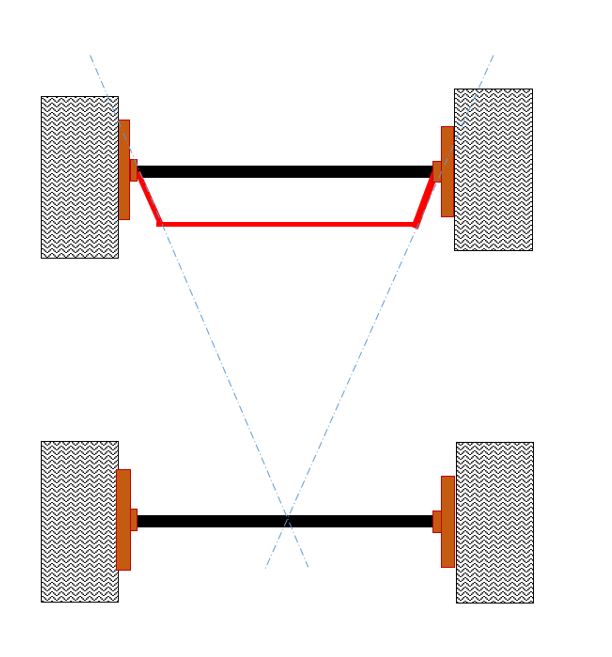
Tener O1 fuera del eje crearía un O decalado que generaría otros rozamientos suplementarios y forzando las ruedas y sistema. Para compensar estos pequeños ángulos, en ocasiones fruto de errores de diseño, se usa en algunos vehículos, ruedas traseras auto direccionales con pequeños ángulos de giro.
 No vamos a continuar complicando los diseños, nos quedaremos como parte importante, que es el hecho de que se ha podido producir un sistema que varía el ángulo de la geometría de Ackerman.
No vamos a continuar complicando los diseños, nos quedaremos como parte importante, que es el hecho de que se ha podido producir un sistema que varía el ángulo de la geometría de Ackerman.


