

Sigamos hablando de parámetros que influyen en la dirección y las posibles modificaciones que el sistema DAS de Mercedes podría modificar. Aunque estoy de acuerdo que el principal parámetro a modificar es el paralelismo o “Toe”, tal y como parecen acordar la mayoría de los equipos, vamos a hablar de otro posible parámetro que influye mucho en la dirección y que es potencialmente modificable con este sistema.
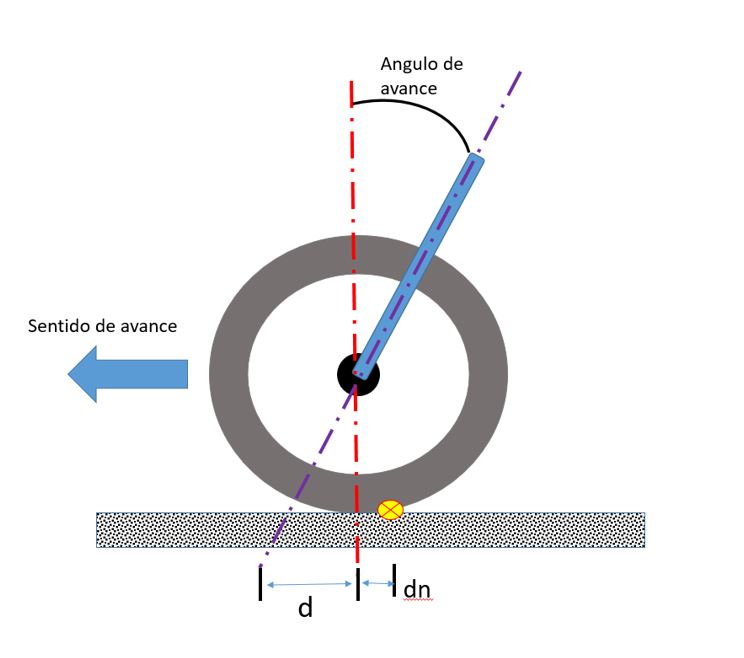
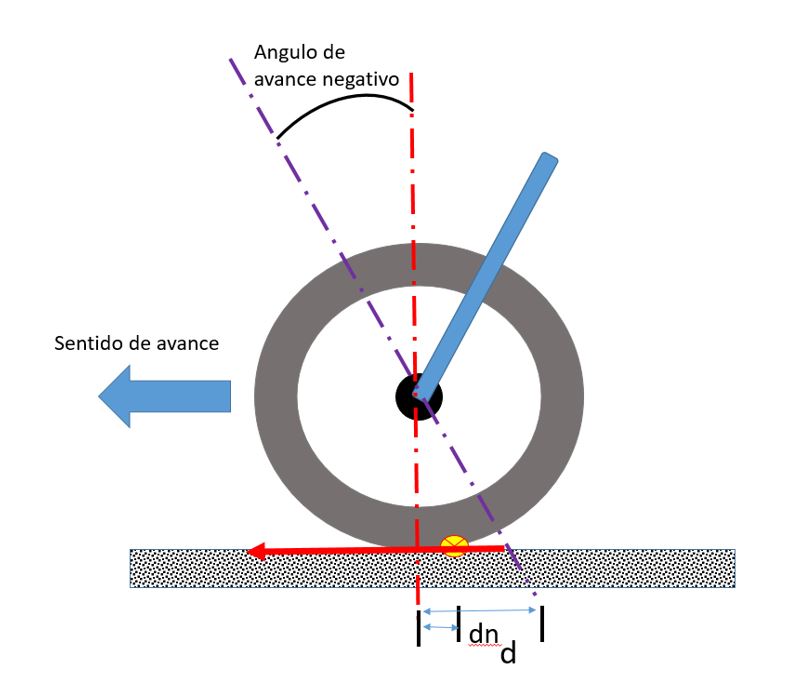
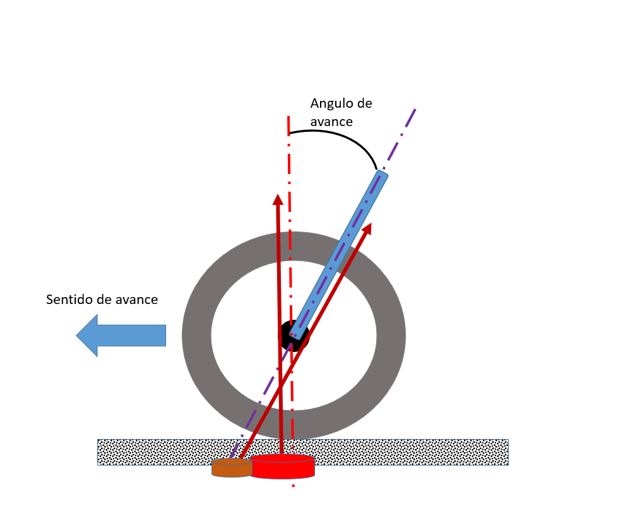
Se trata del ángulo de avance. Dicho ángulo es el ángulo que forma el pivote o eje que transmite el par de giro de la dirección a la rueda, con el eje vertical que pasa por el centro de la rueda y por el que se realiza el giro real.
El sistema DAS podría modificar dicho ángulo dando una serie de ventajas que tratare de explicar a continuación.
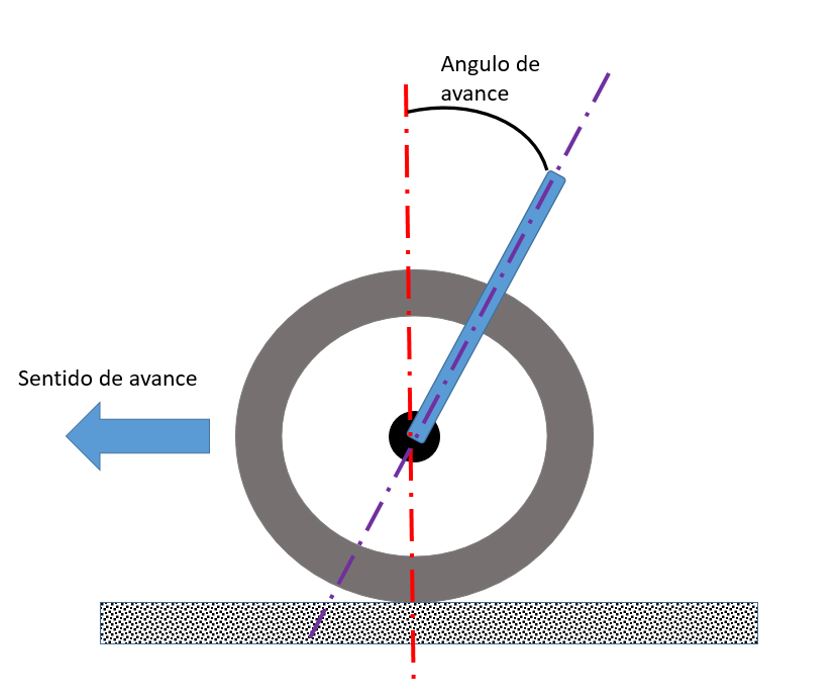
Se justifica este ángulo por la necesidad de tener un par resistente y estabilizar las ruedas direccionales. Especialmente cuando se usa un vehículo de tracción trasera o propulsión.
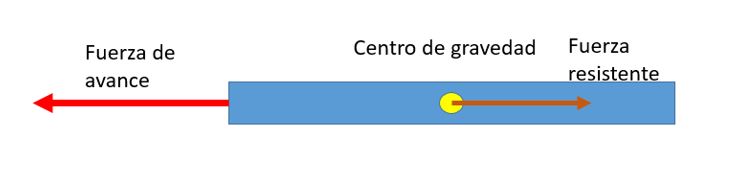
Veamos unos ejemplos. En caso de tracción si hay un giro
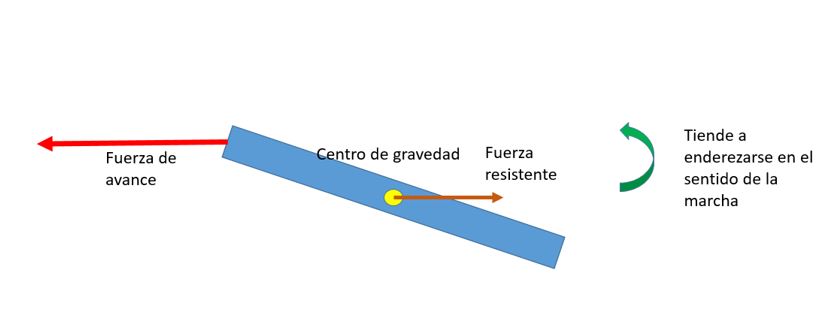
El sistema tiende ha enderezarse en la dirección de la marcha, marcado por la fuerza de avance.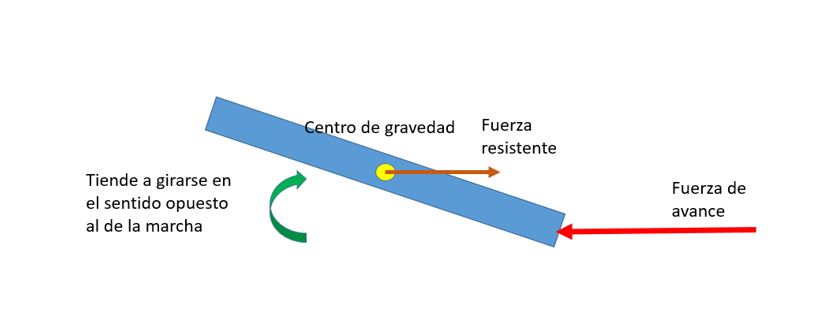
Pero en el caso de propulsión, el par generado por las fuerzas le hace ir en sentido inverso.
En el caso del análisis de un neumático y debido a deformaciones, añadiremos dos distancias.
d = distancia de avance que es la distancia entre los puntos, donde corta el eje de transmisión del par con el plano del suelo y el punto de corte entre el eje vertical de la rueda donde se produce el giro real.
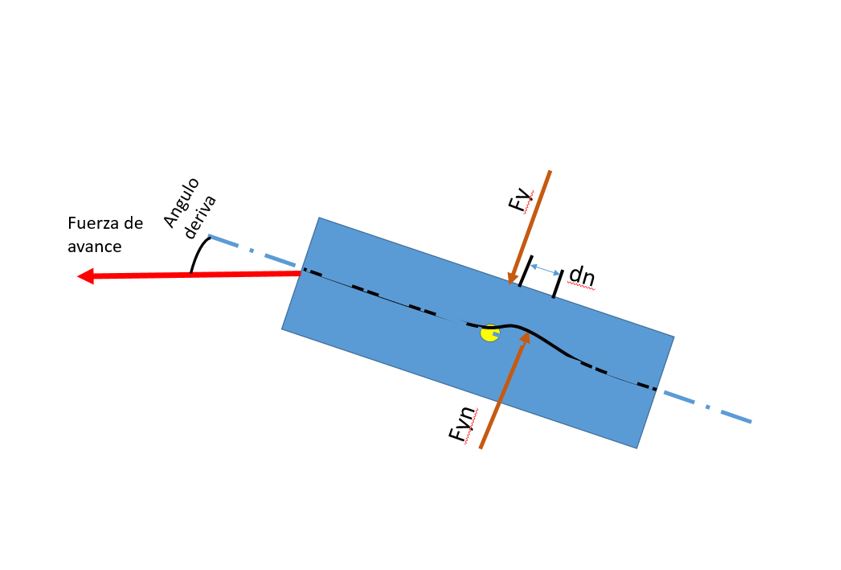
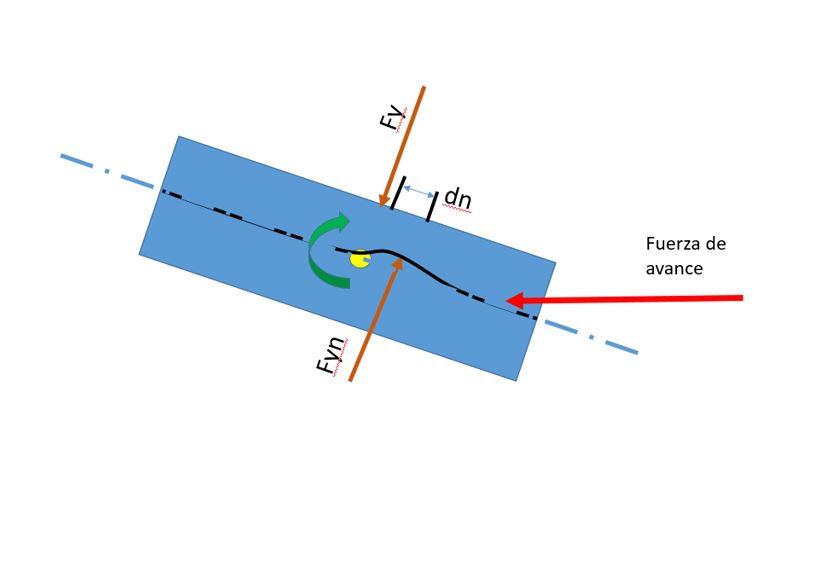
Pero también está la distancia dn. Al aparecer una fuerza lateral sobre el eje de la rueda Fy, el neumático se deforma y la superficie de contacto también debido al ángulo de deriva. Se crea una Fyn que actúa retrasada.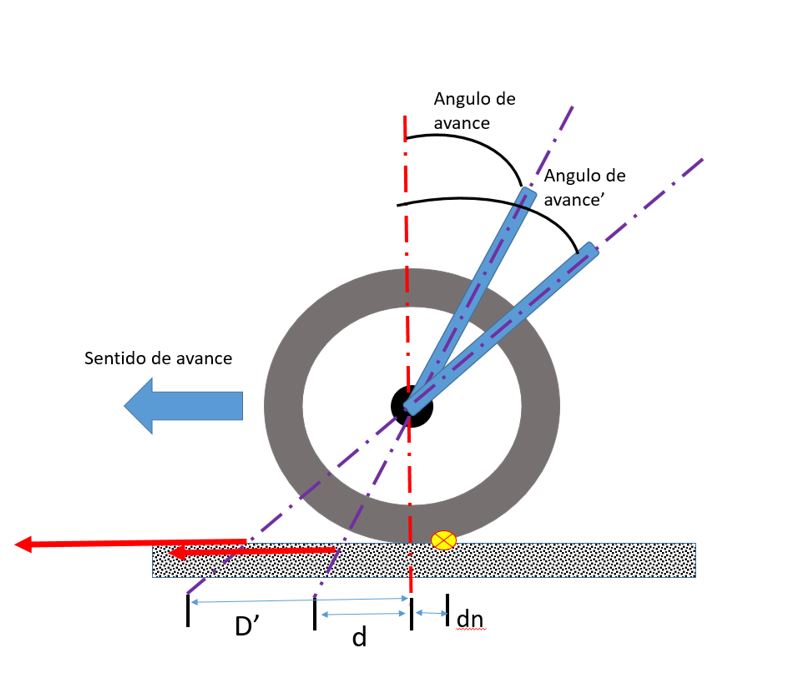
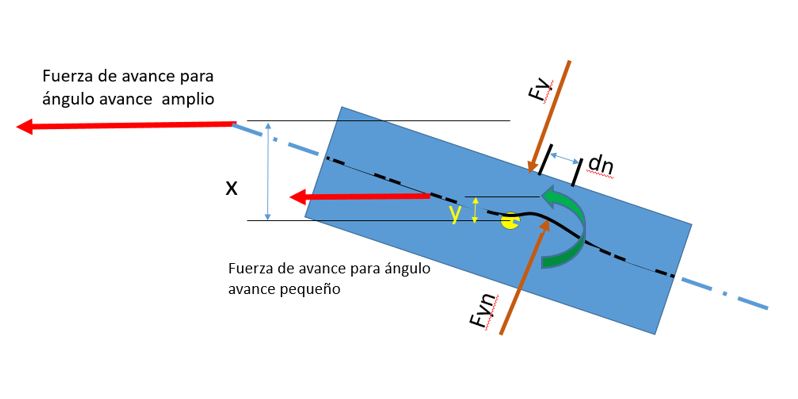
Cuanta más amplitud de ángulo de avance el punto de aplicación de la fuerza de avance está más avanzada.
Esto hace que cuanto mayor ángulo de avance el sistema tienda al equilibrio de forma automática. Es decir, se endereza solo, más fácilmente. Esto es una gran ventaja en las líneas rectas pues a cualquier modificación a alta velocidad el vehículo tiende a ir en línea recta. Ya sea por baches o cualquier perturbación. Además, es más fácil para el piloto conducirlo. En caso de ángulo negativo el vehículo serio inestable y por tanto imposible de conducir.
Lógicamente en curva es más interesante que el ángulo sea pequeño, para poder corregir más suave y rápido. Además, se puede ajustar para corregir el sobreviraje y subviraje. Si el coche tiende a seguir recto, sobrevirador, se puede reducir el ángulo. Si entra demasiado rápido en curva, se puede aumentar.
Este tipo de configuración se aprecia mucho más en las motos, por estar a la vista. Motos para grandes rectas

Alta maniobravilidad

Para terminar, haremos un análisis vectorial más o menos simple para aquellos que tengan unos conceptos de física y trigonometría.
El vector de par, hecho el producto vectorial de la fuerza por la distancia, aplicados al plano del suelo; da como resultado un vector perpendicular a dicho plano. En el caso de tener una aplicación vertical, el giro efectivo seria la componente del vector multiplicada por el seno del ángulo que forma. En este caso para un ángulo de 90° el seno es = 1 y por lo tanto el máximo valor en modulo. Para cualquier ángulo superior o inferior a 90, el valor del seno disminuye hasta 0 (caso de tener el eje horizontal, lo que significaría no hacer nada más que intentar inclinar la rueda).
Esto explica que a más ángulo menos componente vertical (menor valor de seno) y por lo tanto he de hacer más fuerza para corregir la dirección. No profundizaremos mucho más en este estudio por no hacer muy denso y complejo el artículo.


